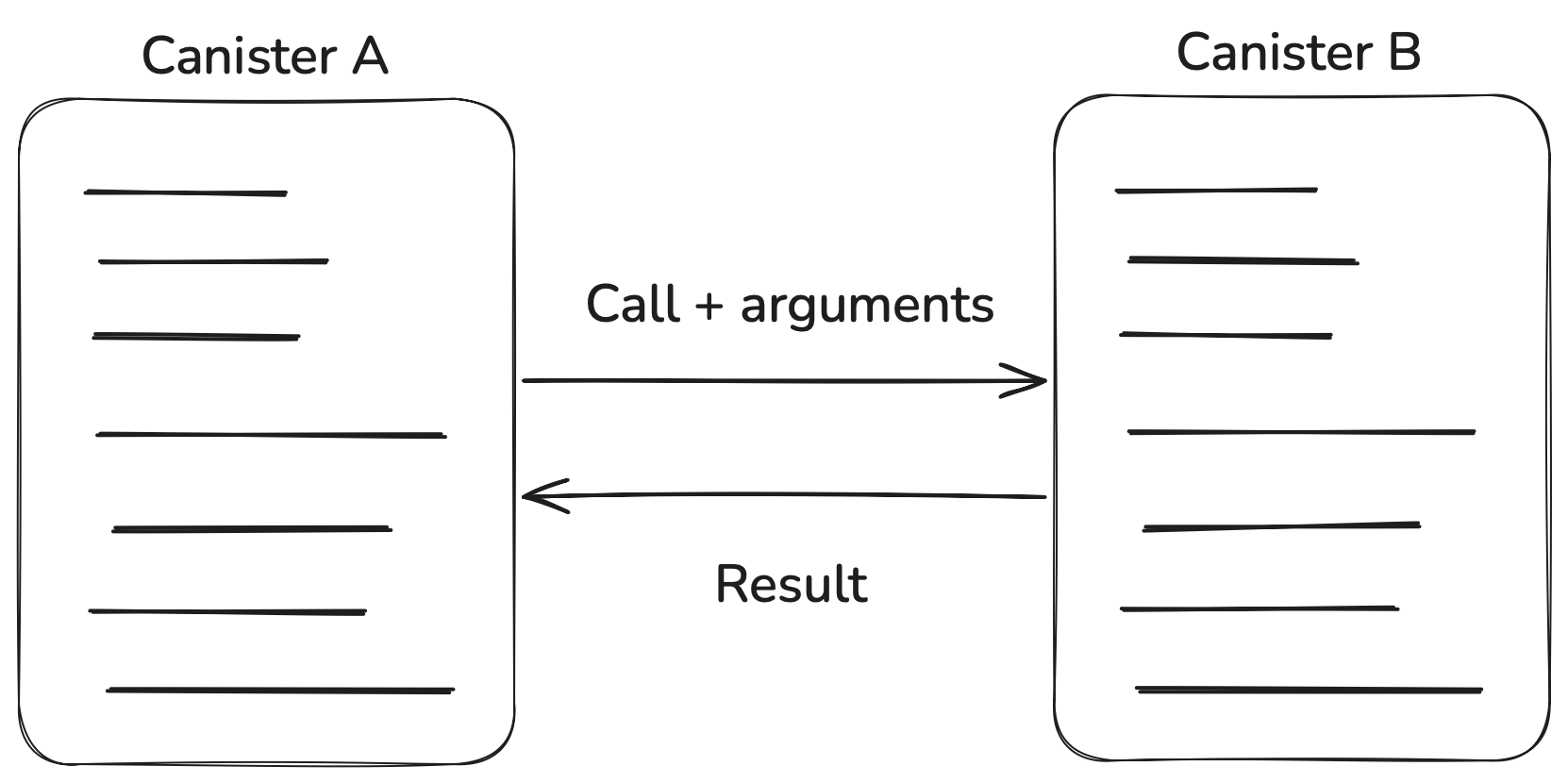
Smart contracts often need to interact with other contracts to share liquidity, compose with external protocols, or access shared infrastructure. In this article, we’ll learn how canisters can call functions from another canister.
The Call System API
On the Internet Computer, a canister invokes a function on another canister via the Call System API. In Rust canisters, this API is exposed through the Call type in the ic_cdk::call module:
use ic_cdk::call::Call;
Call is a builder struct that lets you configure and execute an inter-canister call. To create a Call, you can use one of two constructor functions:
Call::unbounded_wait(...)Call::bounded_wait(...)
Both constructors take two arguments:
- the target canister principal (
Principal), and - the method name (the function you want to call on that canister).
Here’s what constructing an inter-canister call looks like:
-
Call::unbounded_wait():use ic_cdk::call::Call; async fn inter_canister_call() { // Unbounded Wait let result = Call::unbounded_wait("target_canister", "function_name").await; } -
Call::bounded_wait():use ic_cdk::call::Call; async fn inter_canister_call() { // Bounded Wait let result = Call::bounded_wait("target_canister", "function_name").await; }
The difference lies in their wait policy:
unbounded_waitwaits indefinitely for the callee’s response.bounded_waitwaits for a bounded amount of time, after which the call fails if no response is received.
We’ll revisit this distinction later.
After constructing a Call, you can further configure it using builder methods such as:
.with_args(...)to attach arguments.with_cycles(...)to send Cycles to the callee
Inter-canister calls are asynchronous
Inter-canister calls execute asynchronously. This means that once a call is issued, it is handled independently by the runtime and executed in a separate transaction from the caller’s. The broader implications of asynchronous execution and its effects on state changes will be discussed in the next article.
.await and async
In Rust, calling an asynchronous function or System API must be followed by the .await keyword. Without .await, the function will not actually be executed. Therefore, Call::unbounded_wait() must be followed by .await to call the function as shown in the code snippet below.
use ic_cdk::call::Call;
#[ic_cdk::update]
fn inter_canister_call() {
//*** .await keyword added ***
let result = Call::unbounded_wait(target_canister, "function_name").await;
}
Because .await is used, the function that calls Call::unbounded_wait() must be declared as async as shown in the example below:
use ic_cdk::call::Call;
// *** async keyword added ***
#[ic_cdk::update]
async fn inter_canister_call() {
//*** .await keyword added ***
let result = Call::unbounded_wait(target_canister, "function_name").await;
}
The Call System API Returns a Result
The response that the Call API returns will be a Result type. Specifically, Ok(Response) or Err(CallFailed).
Ok(Response)means the inter-canister call is successful.Responseis a raw candid encoded value returned by the remote function.Err(CallFailed)means that the inter-canister call failed.CallFailedis an error type containing a rejection code and a message that describes why the call failed. Details of this error type will be discussed later.
A Simple Check for an Ok(Response) or Err(CallFailed)
To simply identify whether the inter-canister call succeeded, we can use the .is_ok() method. It returns:
trueif theResultisOk(Response),falseif it isErr(error).
Here’s a code snippet that shows how to use .is_ok() on result.
#[ic_cdk::update]
async fn inter_canister(_Callee: Principal) -> bool {
let result = Call::unbounded_wait(_Callee, "function_name").await;
let ok = result.is_ok();
ok // returns true or false
}
In Solidity, this is similar to a low-level contract call. The example below shows a low-level call that plays a role similar to Call::unbounded_wait(). The bool ok value is analogous to calling .is_ok() in our Rust code: it indicates whether the call succeeded.
function callFunction(address target) external returns (bool) {
(bool ok, bytes memory ret ) = target.call(
abi.encodeWithSignature("function_name()")
);
return ok;
}
To demonstrate how inter-canister calls work in practice, we’ll use a minimal example built with Call::unbounded_wait() to invoke a function on another canister. We’ll then progressively extend the example by adding arguments, sending Cycles, handling errors, and decoding return values.
Simple Inter-Canister Call Example
In this section we’ll create an example of a successful inter-canister call.
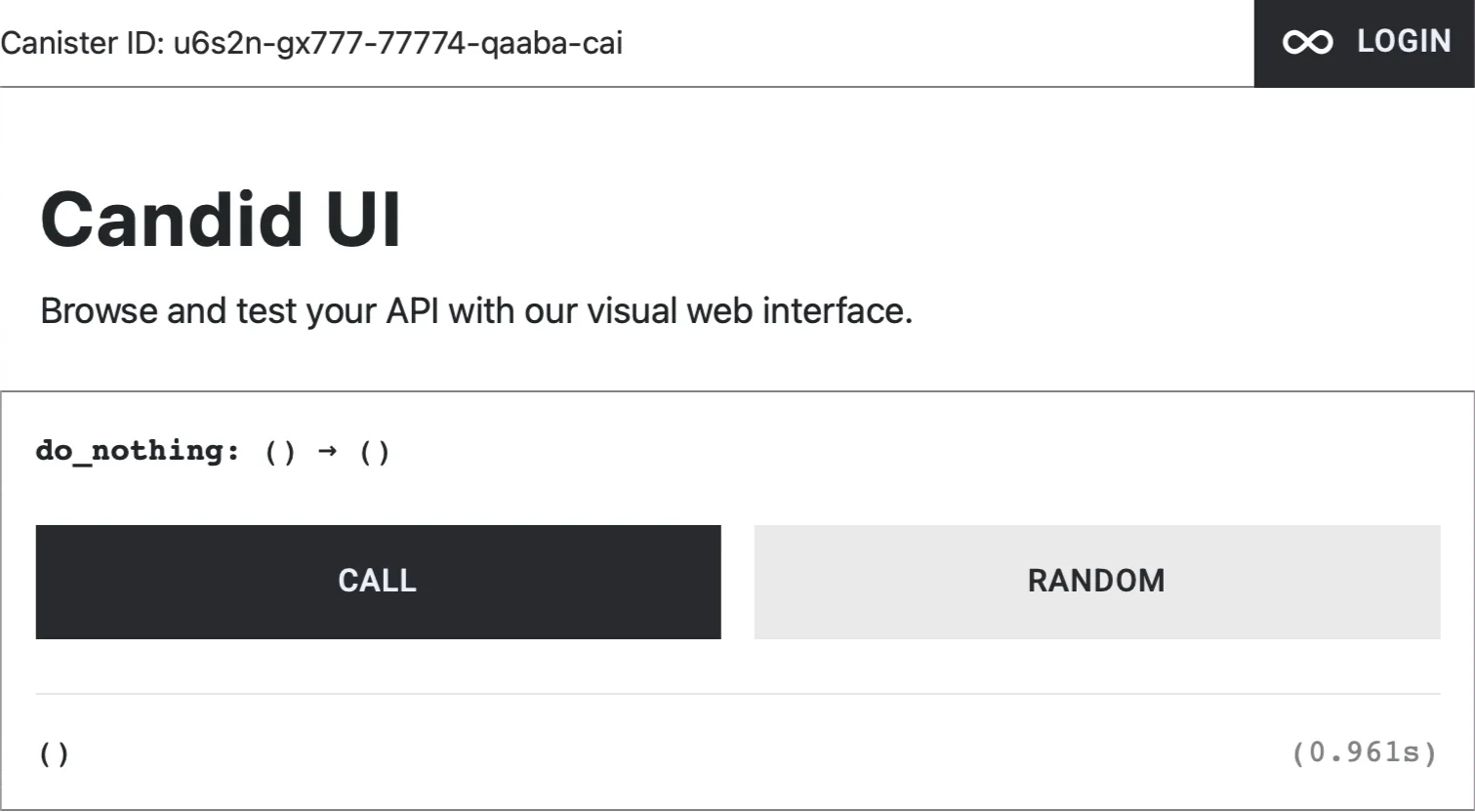
We’ll begin by creating Canister B, which will act as the callee. This canister exposes a single update method, do_nothing, which neither modifies state nor returns a value.
#[ic_cdk::update]
fn do_nothing() {
// actually do nothing
}
ic_cdk::export_candid!();
Deploy Canister B and note its Canister ID (for example: u6s2n-gx777-77774-qaaba-cai). We’ll need this principal when calling it from Canister A.
Next, we create Canister A, which performs the inter-canister call.
use candid::Principal;
use ic_cdk::call::Call;
#[ic_cdk::update]
async fn call_do_nothing(canister_b: Principal) -> bool {
let result = Call::unbounded_wait(canister_b, "do_nothing").await;
result.is_ok()
}
ic_cdk::export_candid!();
In above canister, the call_do_nothing() function does the following:
- Calls
do_nothingonCanister BusingCall::unbounded_wait(). - Awaits the result.
- Returns
trueif the call succeeded, or false otherwise.
Deploy Canister A, then invoke call_do_nothing, passing Canister B’s principal as the argument.
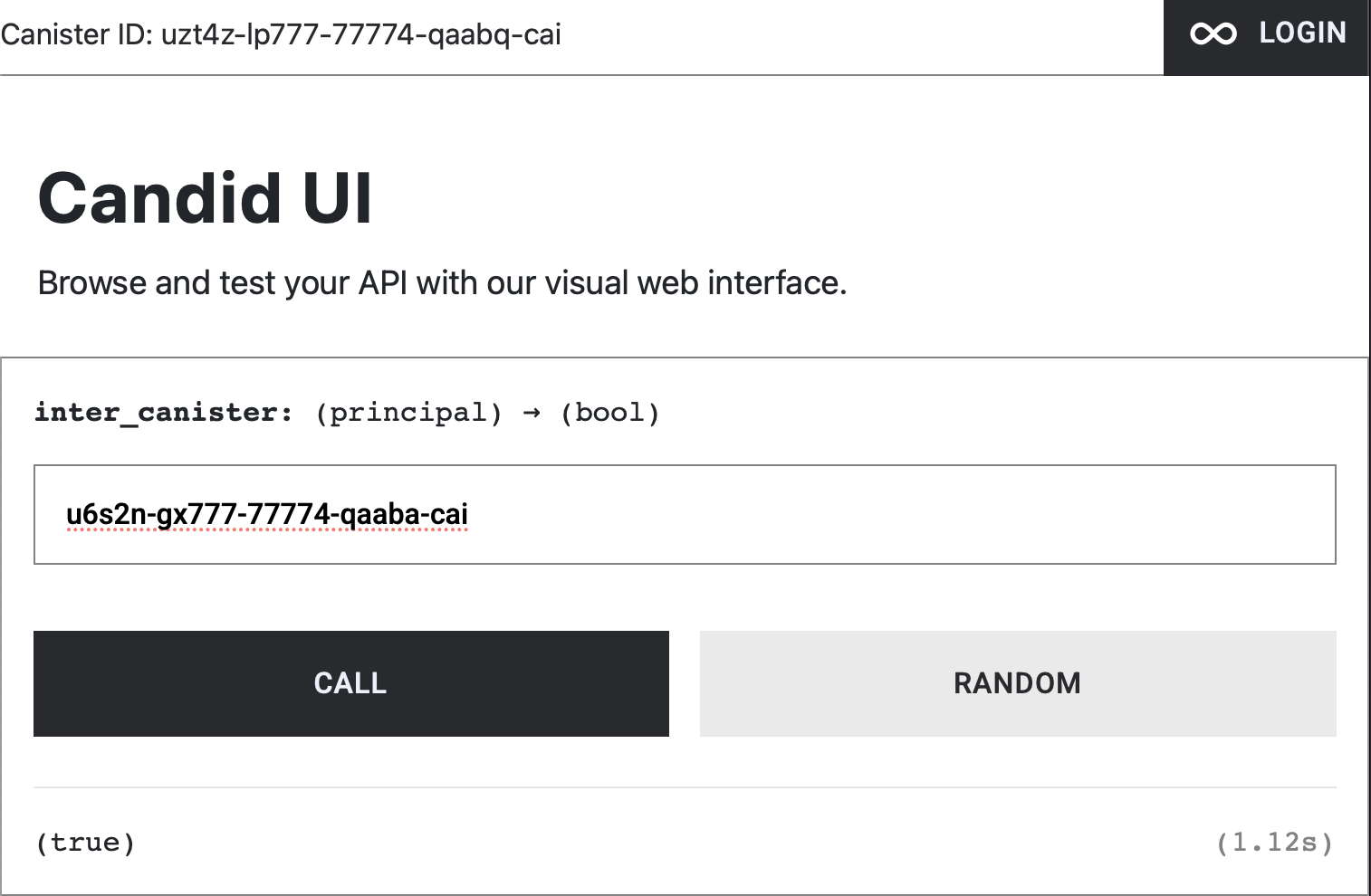
When call_do_nothing is executed:
Call::unbounded_wait(canister_b, "do_nothing").awaitreturns a value of type
Result<Response, CallFailed>..is_ok()checks whether the result is wrapped inOk(...)- Returns true for
Ok(Response) - Returns false for
Err(CallFailed)
- Returns true for
A successful inter-canister call always yields Ok(Response), where Response contains the raw return value of the called function (empty in this example).
Failed Inter-canister Call Example: Err(CallFailed)
Upon setting the wrong canister ID or an invalid method, the result that the Call API returns will be of type Err(CallFailed). The CallFailed payload will contain one of the following reasons:
- The canister ID or the method doesn’t exist.
- The canister trapped.
- The Cycles balance of the target canister is insufficient to execute your inter-canister call.
- The network failed to route your call (cases of such are rare).
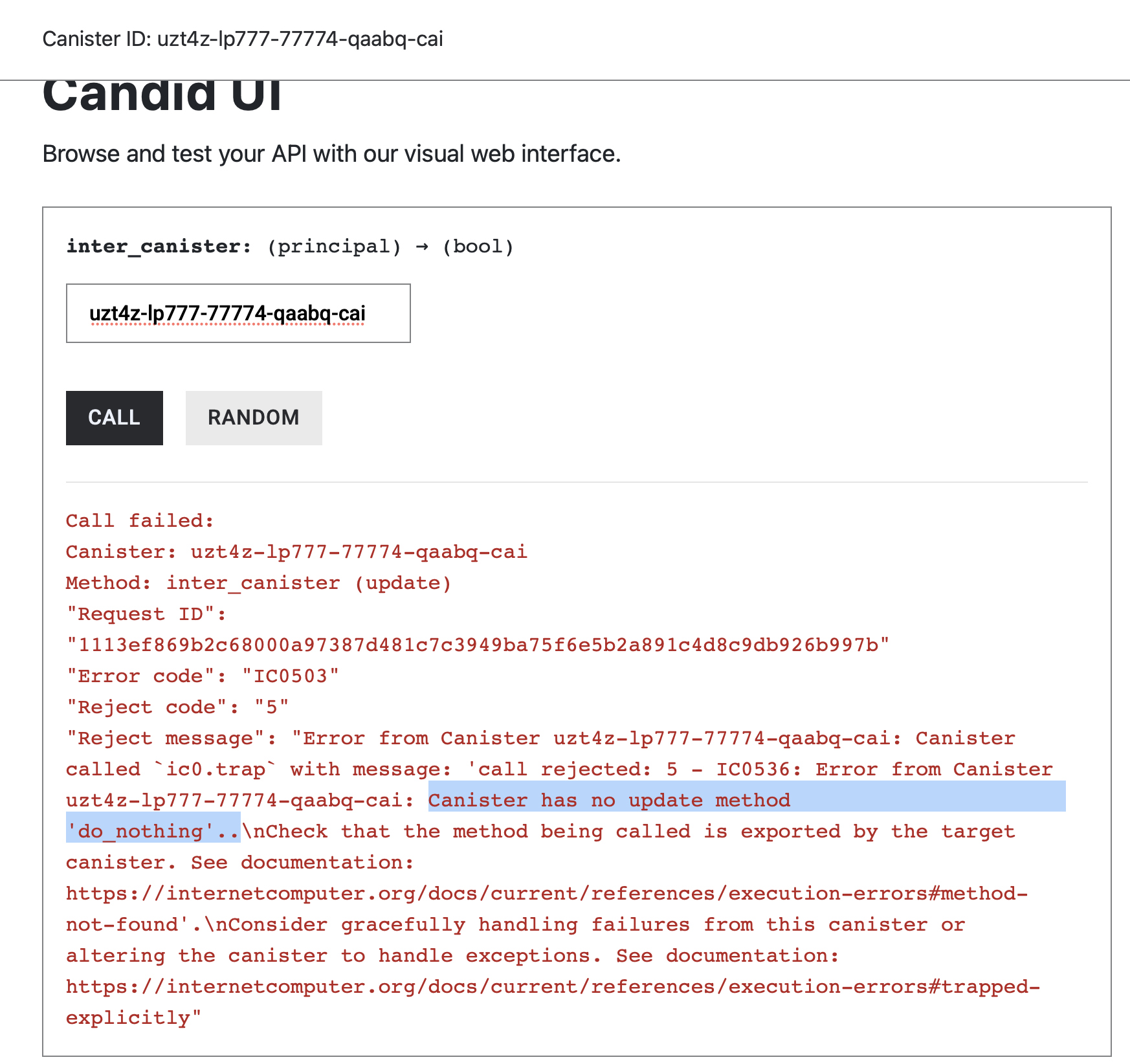
In Canister A, slightly change the target canister’s principal so that it’s wrong. call_do_nothing would return false.
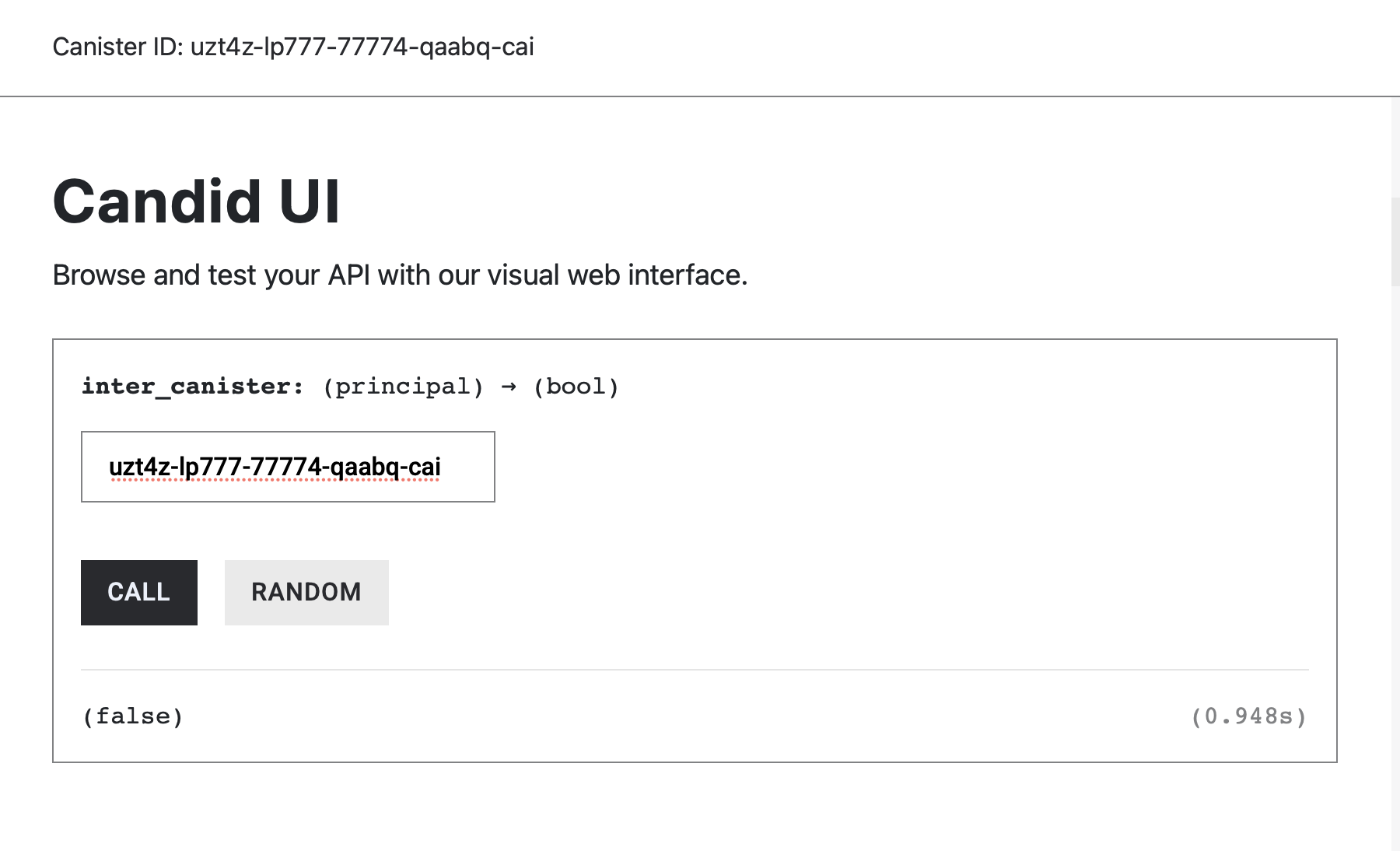
What’s happening is that Call::unbounded_wait() returns an error, Err(CallFailed). .is_ok() returns false if the response is an Err(CallFailed).
Inspecting the CallFailed message
We can unwrap Err(CallFailed) to extract the underlying error message and gain a clearer understanding of why the inter-canister call failed, as shown below:
use candid::Principal;
use ic_cdk::call::Call;
#[ic_cdk::update]
async fn inter_canister(_callee: Principal) -> bool {
let result = Call::unbounded_wait(_callee, "do_nothing").await;
let ok = result.is_ok();
if ok == false {
// Print the error if the call failed
ic_cdk::api::trap(result.unwrap_err().to_string());
}
true
}
ic_cdk::export_candid!();
In the above code, we:
- Perform an inter-canister call using
Call::unbounded_wait(...)and await its result. - Check whether the call succeeded using
.is_ok(). - If the call failed, unwrap the
Err(CallFailed)value and convert it into a string. - Trap with that message, causing the function to panic and revert while surfacing the precise reason for failure.
Re-deploy the canister and call the call_do_noting() function. You will observe that the inter-canister call fails with the error message: “Canister has no update method do_nothing().
Let’s look at another error scenario where the failure originates from Canister B, specifically due to its function trapping.
To achieve this, replace the implementation of do_nothing() in Canister B with an intentional trap:
// Canister B
#[ic_cdk::update]
fn do_nothing() {
ic_cdk::api::trap("Intentional Trap");
}
ic_cdk::export_candid!();
Re-deploy Canister B, then call call_do_nothing again from Canister A, passing Canister B’s principal as before. You will observe that the inter-canister call now fails with an error message containing “Intentional Trap”, which is propagated from the callee canister.
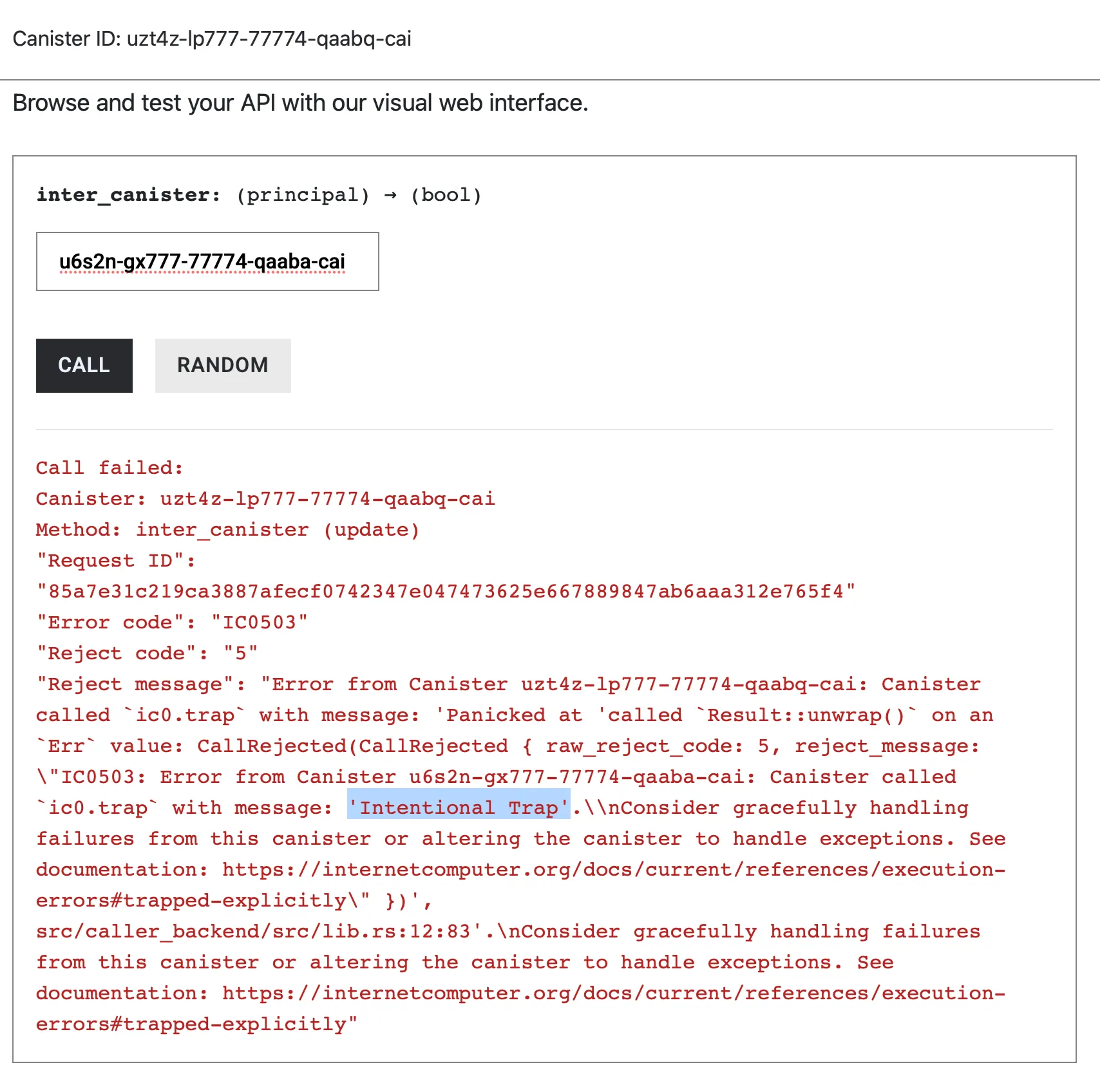
The error message that the called canister returns is part of the Err(CallFailed) result of the inter-canister call.
Wrapping Up
In this article, we explored the fundamentals of inter-canister calls on the Internet Computer using the Call System API. We learned how canisters invoke functions on other canisters asynchronously, how to await and inspect the results of those calls, and how success and failure are represented through Ok(Response) and Err(CallFailed).
Through a minimal example, we demonstrated how Call::unbounded_wait() can be used to perform a basic inter-canister call and how .is_ok() provides a simple way to detect whether the call succeeded. We also examined common failure scenarios, including invalid method names and traps originating from the callee canister.
In the next article, we’ll learn how to pass arguments to inter-canister calls and how to decode the values returned by the called function.